




Awarded the College Best Paper Award
Prof Jeremy Wyatt and I have won the "College research paper of the month" competition for February 2018 with our paper entitle...
Awarded the Ramsay Research Fund
The Ramsay Research Fund has awarded my proposal to develop an "AI Assistant for Semi-Autonomous Upper-Limb Robots". Semi-autonomous...


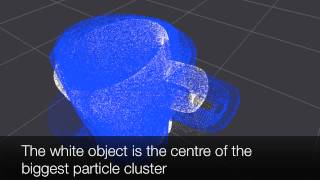
GPAtlasRRT: An exploration strategy for novel object shape modeling
http://www.worldscientific.com/doi/abs/10.1142/S0219843618500147 In this work, we use a Gaussian Process (GP) as such representation....


Feature-Based Transfer Learning for Robotic Push Manipulation
This work presents a data-efficient approach to learning transferable forward models for robotic push manipulation. Our approach extends...
Grasping a Shape with Uncertain Location
Successful grasp planning requires an appropriate finger placement for which object geometry and location need to be known. Here we...


Two-level RRT Planning for Robotic Push Manipulation
Pushing operations are encountered frequently in robotics, but have received comparatively little attention in the research comunity. In...

Exploratory Reach-to-Grasp Trajectories for Uncertain Object Poses
This work addresses the problem of planning the reach-to-grasp trajectory for a robotic arm and hand, when there is uncertainty in the...
Sequential Trajectory Re-planning for Dexterous Grasping
This work, firstly, describes how to iteratively update localisation knowledge using tactile observations from a previous grasp attempt;...
Planning Trajectories under Object Pose Uncertainty
Planning in robotics means coping with dynamic and uncertain worlds. Unstructured worlds are perceived by the agent through noisy sensors...

























