



GPAtlasRRT: An exploration strategy for novel object shape modeling
- Claudio Zito
- Sep 23, 2017
- 1 min read
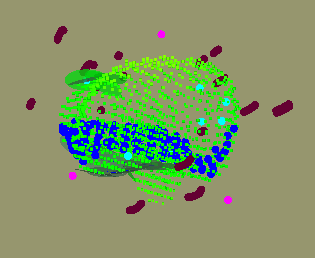
http://www.worldscientific.com/doi/abs/10.1142/S0219843618500147 In this work, we use a Gaussian Process (GP) as such representation. Then, using the fact that the 0-levelset of the GP - the surface of the object - is an implicitly dened manifold, we borrow the AtlasRRT algorithm concept to simultaneously: (i) build an atlas via continuation methods that locally parameterizes the object and that is used to select the next-best touch, and (ii) use an RRT-like strategy to devise directions for the expansion of the atlas to trade completeness in the exploration for efficiency.






































Comments